
El auge de la economía de las máquinas: cómo Web3 impulsa a los robots de herramientas a sistemas autónomos

Introducción
En los últimos años, la industria de los robots ha experimentado un doble punto de inflexión tanto en el ámbito tecnológico como en el paradigma comercial. En el pasado, los robots eran vistos principalmente como "herramientas", dependientes de la gestión empresarial, incapaces de colaborar de forma autónoma y sin capacidad para realizar actividades económicas. Sin embargo, con la integración de nuevas tecnologías como AI Agent, pagos on-chain (x402) y Machine Economy, el ecosistema robótico está evolucionando de una competencia puramente de hardware a un sistema complejo de múltiples capas compuesto por "cuerpo—inteligencia—pagos—organización".
Aún más relevante es que los mercados de capital globales están valorando rápidamente esta tendencia. JPMorgan predice que, para 2050, el mercado de robots humanoides podría alcanzar los 5 trillones de dólares, impulsando además el crecimiento de industrias periféricas como la cadena de suministro, operaciones y servicios. Ese mismo año, se espera que el número de robots humanoides en uso supere los 1.1 billones de unidades. Esto significa que los robots pasarán de ser equipos industriales a convertirse realmente en "participantes sociales a gran escala".(1)
Para entender la dirección futura de la industria robótica, podemos concebir todo el ecosistema como una estructura jerárquica de cuatro niveles claramente definidos:
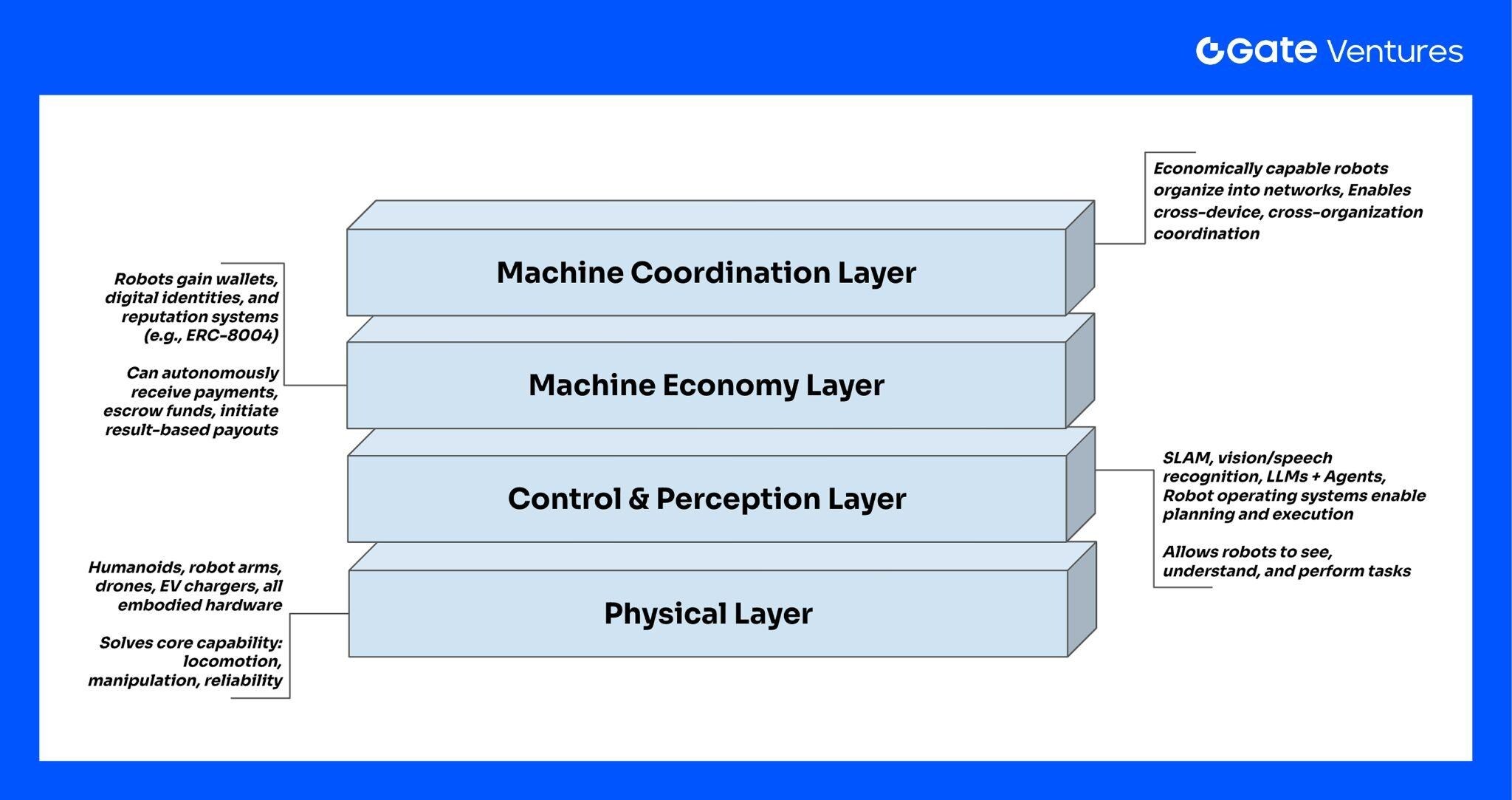
Source: Gate Ventures
La primera capa es la base física (Physical Layer): incluye humanoides, brazos robóticos, drones, estaciones de carga para vehículos eléctricos (EV), y todos los portadores físicos. Estos resuelven problemas básicos de movimiento y capacidad operativa, como caminar, agarrar, fiabilidad mecánica y coste. Sin embargo, las máquinas en este nivel siguen careciendo de "capacidad de acción económica", es decir, no pueden realizar de forma autónoma cobros, pagos o adquisiciones de servicios.
La segunda capa es la capa de control y percepción (Control & Perception Layer): abarca desde la cibernética robótica tradicional, SLAM, sistemas de percepción, reconocimiento de voz y visión, hasta los actuales LLM+Agent y sistemas operativos robóticos cada vez más capaces de planificación abstracta (como ROS, OpenMind OS). Esta capa permite que las máquinas "entiendan, vean y ejecuten tareas", pero las actividades económicas como pagos, contratos e identidad aún deben ser gestionadas por humanos en el backend.
La tercera capa es la capa de liquidación económica (Machine Economy Layer): aquí es donde comienza la verdadera transformación. Las máquinas empiezan a tener monederos, identidades digitales, sistemas de reputación (como ERC-8004), y pueden pagar directamente por cómputo, datos, energía y derechos de paso mediante mecanismos como x402, liquidación on-chain y Onchain Callback; al mismo tiempo, pueden recibir pagos de forma autónoma por ejecutar tareas, custodiar fondos e iniciar pagos basados en resultados (result-based pay). Esta capa permite que los robots pasen de ser "activos empresariales" a "sujetos económicos" con capacidad para participar en el mercado.
La cuarta capa es la de coordinación y gobernanza (Machine Coordination Layer): cuando un gran número de robots tienen capacidad de pago e identidad autónoma, pueden organizarse en flotas y redes—enjambres de drones, redes de robots de limpieza, redes energéticas de EV, etc. Pueden ajustar precios automáticamente, programar turnos, pujar por tareas, compartir beneficios e incluso formar economías autónomas en forma de DAO.
A través de esta estructura de cuatro capas, podemos observar:
El futuro ecosistema robótico ya no será solo una revolución de hardware, sino una reestructuración sistémica de "físico + inteligencia + finanzas + organización".
Esto no solo redefine los límites de las capacidades de las máquinas, sino también la forma de capturar valor. Tanto las empresas de robótica, desarrolladores de IA, proveedores de infraestructura como los protocolos nativos de pagos e identidad en cripto encontrarán su lugar en el nuevo sistema económico robótico.
¿Por qué la industria robótica está explotando ahora?
Durante las últimas décadas, la industria robótica ha permanecido en laboratorios, ferias y escenarios industriales específicos, siempre a un paso de la comercialización y despliegue social a gran escala. Sin embargo, a partir de 2025, este paso comienza a superarse. Tanto desde el mercado de capitales, el grado de madurez tecnológica, como desde la perspectiva de observadores de la industria como el CEO de Nvidia, Jensen Huang, se transmite la misma señal:
“The ChatGPT moment for general robotics is just around the corner”
Este juicio no es una exageración publicitaria, sino que se basa en tres señales industriales clave:
1. Madurez simultánea de capacidades básicas como cómputo, modelos, simulación y control de percepción
2. La inteligencia robótica pasa de control cerrado a toma de decisiones abierta impulsada por LLM/Agent
3. Salto de la capacidad individual a la capacidad sistémica: los robots pasarán de ser "agentes activos" a "capaces de colaborar, comprender y operar económicamente"
Jensen Huang incluso predice que los robots humanoides se comercializarán ampliamente en los próximos 5 años, una visión que coincide con el comportamiento del mercado de capitales y la implementación industrial prevista para 2025.
Desde el capital: la enorme financiación demuestra que el "punto de inflexión robótico" ya ha sido valorado por el mercado
En 2024–2025, la industria robótica ha visto una densidad y escala de financiación sin precedentes, con varias rondas superiores a 500 millones de dólares solo en 2025. Ejemplos típicos incluyen:
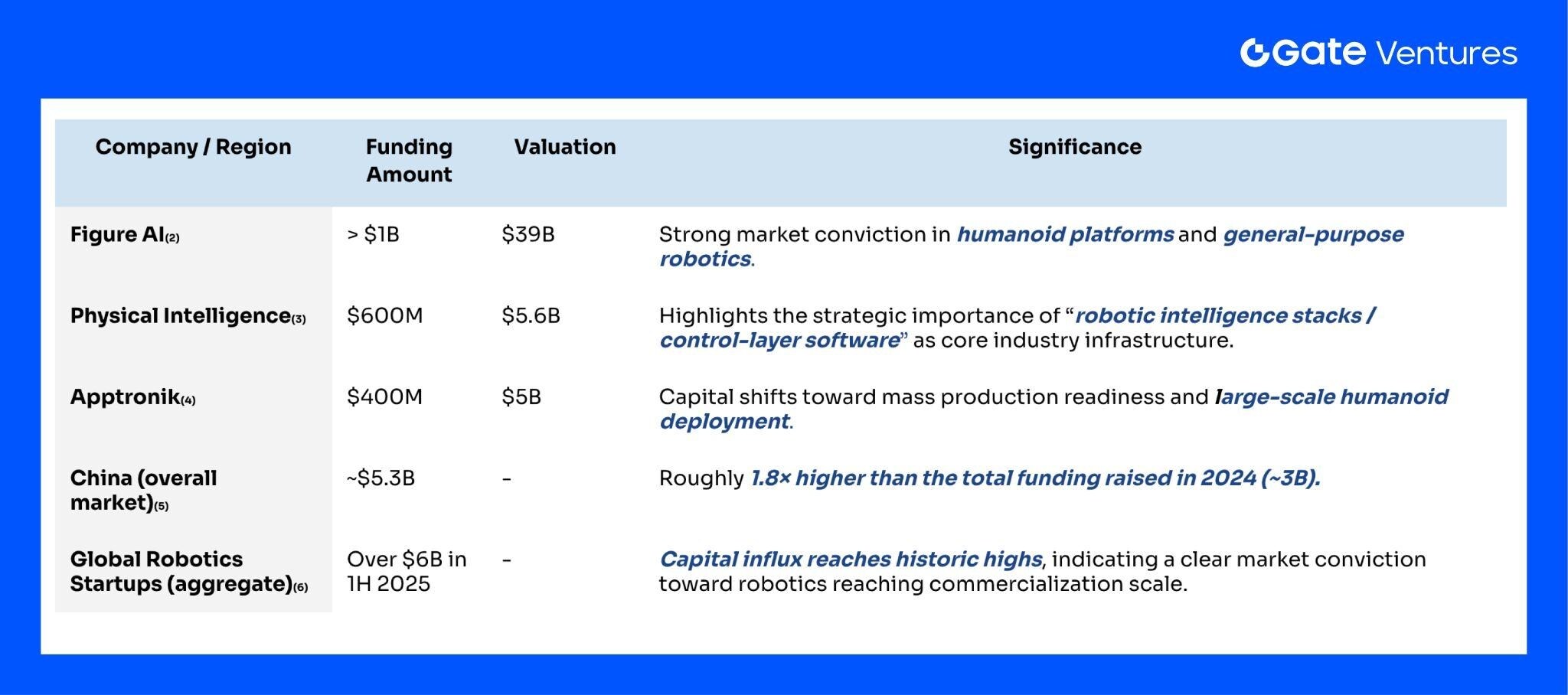
Source: Gate Ventures
El capital expresa claramente: la industria robótica ha llegado a una etapa de inversión verificable.
Características comunes de estas financiaciones:
● No es "financiación conceptual", sino dirigida a líneas de producción, cadena de suministro, inteligencia general y despliegue comercial
● No son proyectos dispersos, sino arquitecturas full-stack que integran hardware y software, y sistemas de servicio para todo el ciclo de vida del robot
El capital no apuesta ciegamente por escalas de cientos de millones; detrás hay una confirmación de la madurez industrial.
Desde la tecnología: avances decisivos ocurren simultáneamente
En 2025, la industria robótica experimenta una "convergencia tecnológica" histórica. En primer lugar, los avances en AI Agent y grandes modelos de lenguaje permiten que los robots evolucionen de "máquinas operativas" que solo ejecutan instrucciones a "agentes inteligentes comprensivos" capaces de entender lenguaje, descomponer tareas y razonar combinando visión y tacto. La percepción multimodal y los nuevos modelos de control (como RT-X, Diffusion Policy) otorgan a los robots una capacidad básica cercana a la inteligencia general.
Source: Nvidia
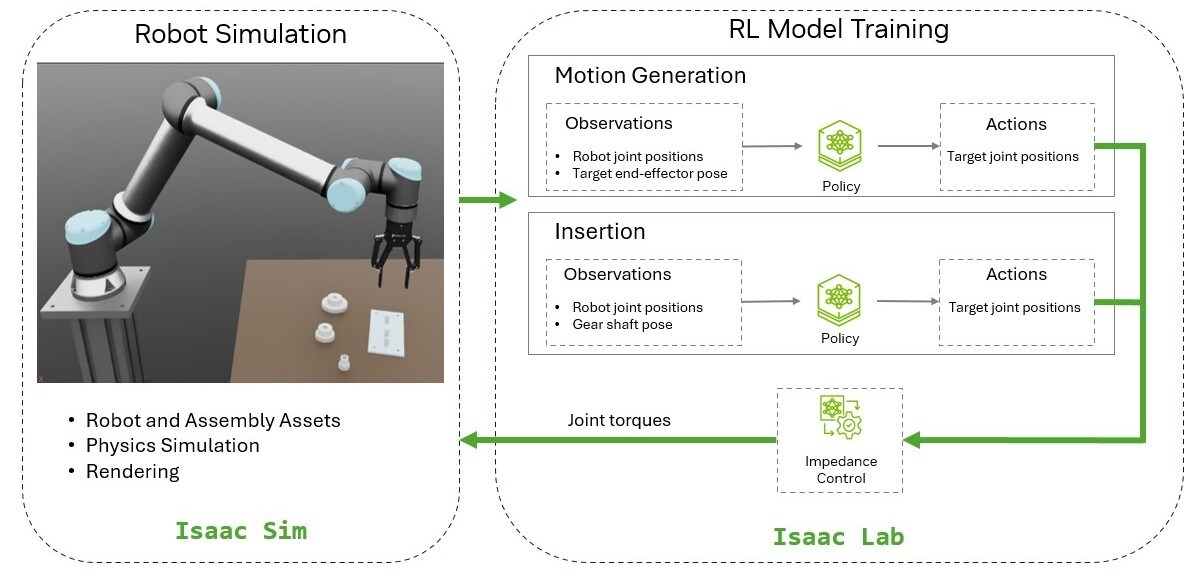
Al mismo tiempo, la simulación y la tecnología de transferencia maduran rápidamente. Entornos de simulación de alta fidelidad como Isaac y Rosie reducen significativamente la brecha entre simulación y realidad, permitiendo que los robots se entrenen a gran escala en entornos virtuales a bajo coste y se transfieran de forma fiable al mundo real. Esto resuelve el cuello de botella fundamental de la lentitud en el aprendizaje robótico, el alto coste de la recogida de datos y el riesgo en entornos reales.
La evolución del hardware también es clave. Componentes esenciales como motores de par, módulos articulares y sensores reducen costes gracias a la escala de la cadena de suministro, y el rápido ascenso de China en la cadena de suministro global de robots impulsa aún más la productividad del sector. Con varias empresas iniciando planes de producción en masa, los robots cuentan por primera vez con una base industrial "replicable y desplegable a escala".
Por último, las mejoras en fiabilidad y eficiencia energética permiten que los robots cumplan realmente los requisitos mínimos para aplicaciones comerciales. Mejor control de motores, sistemas de seguridad redundantes y sistemas operativos en tiempo real permiten que los robots funcionen de forma estable durante largos periodos en entornos empresariales.
Estos factores permiten que la industria robótica tenga por primera vez las condiciones completas para pasar de la "fase de demostración en laboratorio" al "despliegue real a gran escala". Esta es la razón fundamental por la que la explosión robótica ocurre ahora.
Desde la comercialización: de prototipos a producción en masa y despliegue en el mundo real
2025 es también el año en que el camino hacia la comercialización de robots se hace claramente visible. Empresas líderes como Apptronik, Figure y Tesla Optimus anuncian planes de producción en masa, marcando el paso de los robots humanoides de prototipos a una etapa industrializable y replicable. Al mismo tiempo, varias empresas inician pruebas piloto en escenarios de alta demanda como logística de almacenes y automatización de fábricas, validando la eficiencia y fiabilidad de los robots en entornos reales.
Con la mejora de la capacidad de producción en masa de hardware, el modelo "Operation-as-a-Service (OaaS)" comienza a validarse en el mercado. Las empresas ya no necesitan pagar altos costes de adquisición de una sola vez, sino que pueden suscribirse mensualmente a servicios robóticos, mejorando significativamente la estructura del ROI. Este modelo es una innovación comercial clave para impulsar la adopción a gran escala de robots.
Además, la industria está completando rápidamente los sistemas de servicios previamente ausentes, incluyendo redes de mantenimiento, suministro de repuestos, plataformas de monitoreo remoto y operación. Con el desarrollo de estas capacidades, los robots adquieren las condiciones necesarias para operar de forma continua y cerrar el ciclo comercial.
En general, 2025 es un año hito en el que los robots pasan de "¿se puede hacer?" a "¿se puede vender, usar y es asequible?", y el camino hacia la comercialización muestra por primera vez un ciclo positivo sostenible.
Web3 X Ecosistema Robótico
Con la explosión total de la industria robótica en 2025, la tecnología blockchain encuentra un posicionamiento claro, proporcionando varias capacidades clave al sistema robótico. Su valor central puede resumirse en tres direcciones principales: i.) recopilación de datos para tecnología robótica, ii.) redes de coordinación de máquinas entre dispositivos, y iii.) redes económicas que permiten la participación autónoma de las máquinas en el mercado.
Descentralización + mecanismos de incentivos con tokens: nuevas fuentes de datos para el entrenamiento robótico, pero la calidad de los datos depende de la mejora del Data Engine backend
El principal cuello de botella para entrenar modelos Physical-AI es la escala de datos del mundo real, la cobertura de escenarios y la escasez de datos de interacción física de alta calidad. La aparición de DePIN/DePAI permite que Web3 ofrezca nuevas soluciones en cuanto a "quién contribuye datos y cómo se contribuyen de forma continua".
Sin embargo, desde la investigación académica, los datos descentralizados, aunque tienen potencial en escala y cobertura, no equivalen automáticamente a datos de entrenamiento de alta calidad; aún requieren filtrado, limpieza y control de sesgos por parte del data engine backend para ser realmente útiles en el entrenamiento de grandes modelos.
En primer lugar, Web3 resuelve el problema de "motivación para el suministro de datos", no garantiza directamente la "calidad de los datos".
Tradicionalmente, los datos de entrenamiento robótico provienen de laboratorios, pequeñas flotas o recopilación interna empresarial, con una escala insuficiente.
El modelo DePIN/DePAI de Web3, mediante incentivos con tokens, permite que usuarios comunes, operadores de dispositivos o controladores remotos se conviertan en contribuyentes de datos, aumentando significativamente la escala y diversidad de las fuentes de datos.
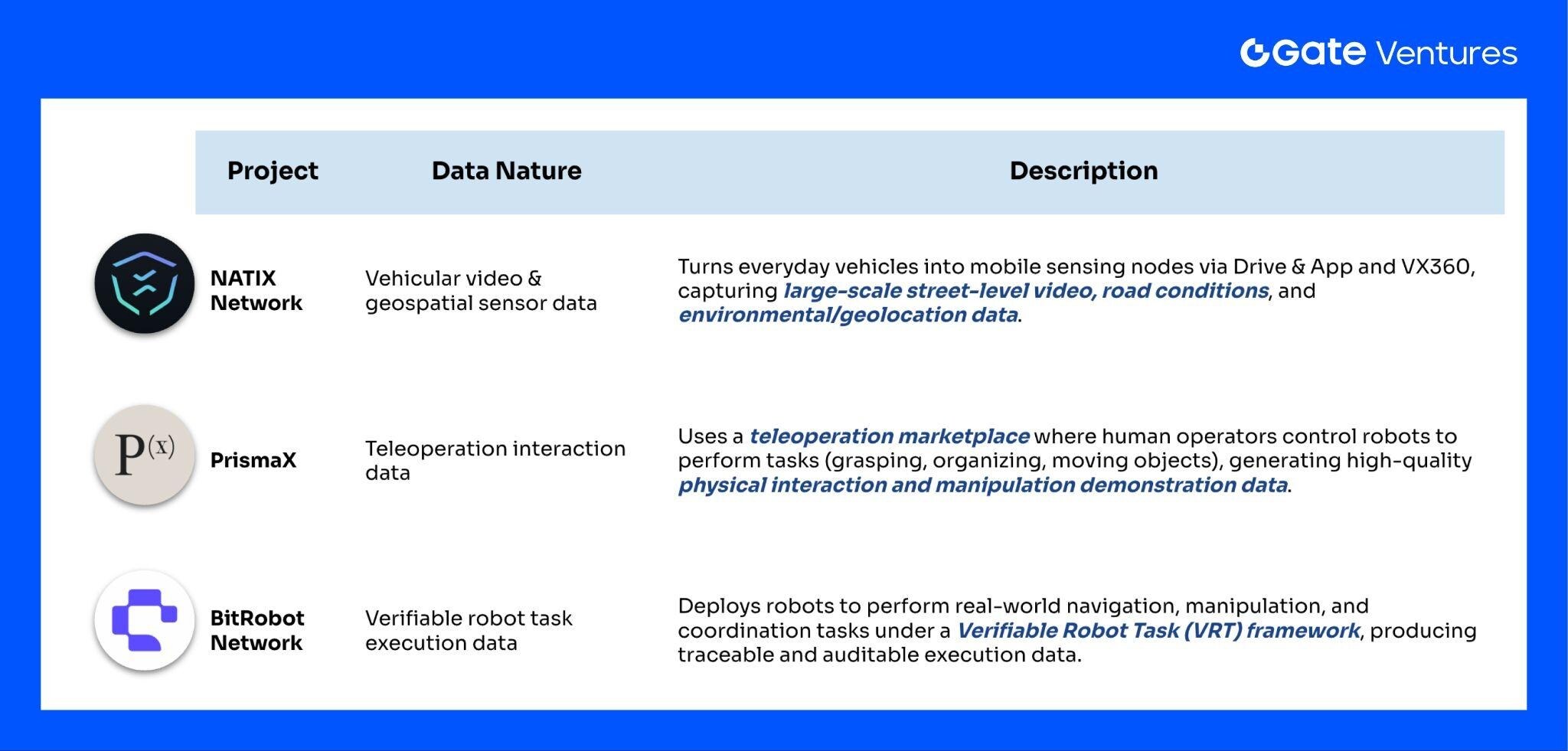
Proyectos incluyen:
Source: Gate Ventures
● NATIX Network: convierte vehículos comunes en nodos móviles de datos a través de Drive& App y VX360, recopilando datos de vídeo, geolocalización y ambientales.
● PrismaX: recopila datos de interacción física de alta calidad de robots (agarrar, organizar, mover objetos) mediante un mercado de control remoto.
● BitRobot Network: permite que nodos robóticos ejecuten tareas verificables (VRT), generando datos de operaciones reales, navegación y comportamiento colaborativo.
Estos proyectos demuestran que Web3 puede ampliar eficazmente el lado de la oferta de datos, cubriendo escenarios y casos de larga cola que el sistema tradicional no puede abarcar.
Pero según la investigación académica, los datos crowdsourced/descentralizados suelen presentar problemas estructurales de "baja precisión, alto ruido y gran sesgo". Numerosos estudios sobre crowdsourcing y mobile crowdsensing señalan:
1. Gran variabilidad en la calidad de los datos, diferencias significativas en ruido y formato
Las diferencias en dispositivos, métodos de operación y comprensión entre contribuyentes generan muchos datos inconsistentes, que requieren detección y filtrado.
2. El sesgo estructural es común
Los participantes suelen concentrarse en áreas o grupos específicos, lo que provoca que la distribución de la muestra no coincida con la del mundo real.
3. Los datos crowdsourced originales no pueden usarse directamente para entrenar modelos
La investigación en conducción autónoma, embodied AI y robótica enfatiza que los conjuntos de entrenamiento de alta calidad requieren un proceso completo: recopilación → revisión de calidad → alineación redundante → aumento de datos → compensación de larga cola → corrección de consistencia de etiquetas, y no simplemente "recopilar y usar". (7)
Por tanto, las redes de datos Web3 ofrecen fuentes de datos más amplias, pero "si pueden usarse directamente como datos de entrenamiento" depende de la ingeniería de datos backend.
El verdadero valor de DePIN es proporcionar una base de datos "continua, escalable y de menor coste" para la Physical AI
En lugar de decir que Web3 resuelve inmediatamente el problema de precisión de los datos, es más correcto decir que resuelve:
● "¿Quién está dispuesto a contribuir datos a largo plazo?"
● "¿Cómo incentivar la conexión de más dispositivos reales?"
● "¿Cómo transformar el modelo de recopilación de datos de centralizado a una red abierta y sostenible?"
En otras palabras, DePIN/DePAI proporciona la base para la escala y cobertura de datos, haciendo de Web3 una pieza clave en la "capa de origen de datos" de la era Physical AI, pero no el único garante de la calidad de los datos.
Redes de coordinación de máquinas entre dispositivos: sistemas operativos universales como base de comunicación para la colaboración robótica
La industria robótica está pasando de la inteligencia individual a la colaboración en grupo, pero persiste un cuello de botella clave: robots de diferentes marcas, formas y stacks tecnológicos no pueden compartir información, interoperar ni cuentan con un medio de comunicación unificado. Esto hace que la colaboración multi-robot dependa de sistemas cerrados propios de los fabricantes, limitando enormemente el despliegue a escala.
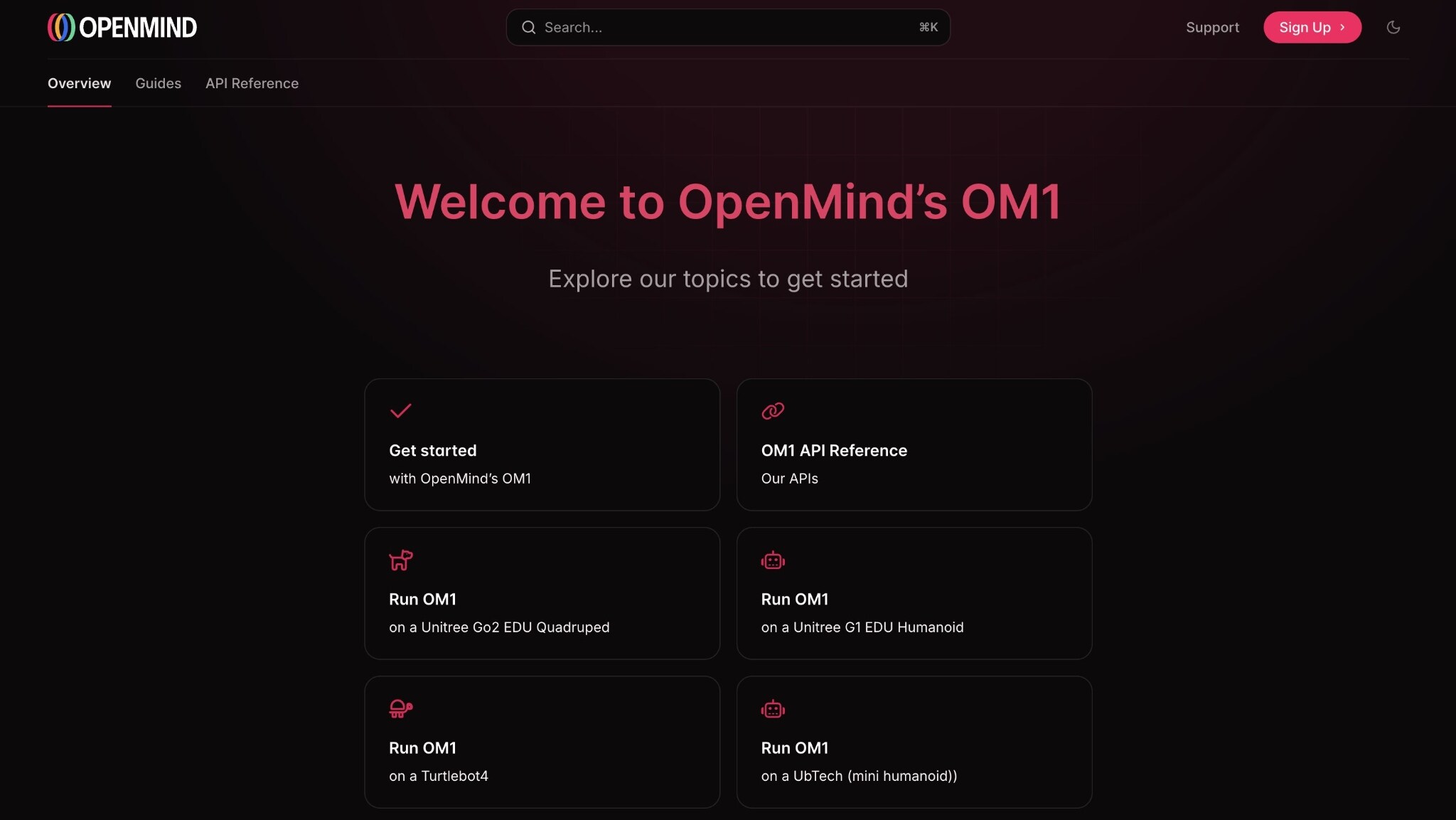
En los últimos años, han surgido capas de sistemas operativos robóticos universales (Robot OS Layer), representadas por OpenMind, que ofrecen nuevas soluciones a este problema. Estos sistemas no son "software de control" en el sentido tradicional, sino sistemas operativos inteligentes inter-máquina, que, como Android en la industria móvil, proporcionan un lenguaje común y una infraestructura pública para la comunicación, cognición, comprensión y colaboración entre robots.(8)
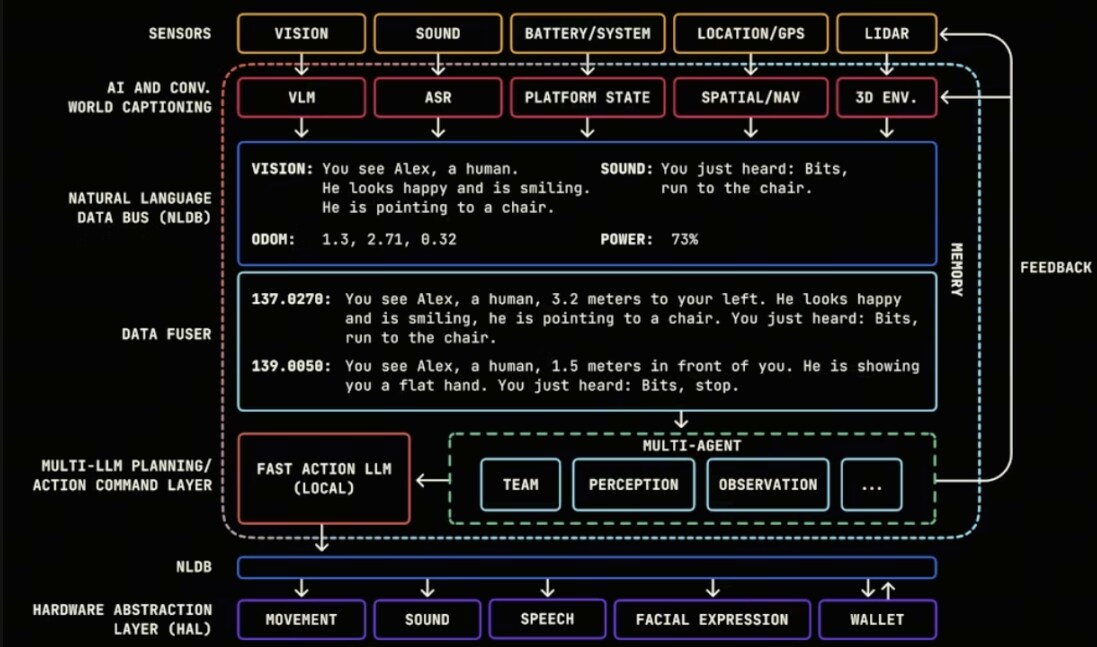
En la arquitectura tradicional, los sensores, controladores y módulos de razonamiento de cada robot están aislados internamente y no pueden compartir información semántica entre dispositivos. La capa de sistema operativo universal, mediante interfaces de percepción unificadas, formatos de decisión y métodos de planificación de tareas, permite por primera vez que los robots tengan:
● Descripción abstracta del entorno (visión / sonido / táctil → eventos semánticos estructurados)
● Comprensión unificada de instrucciones (lenguaje natural → planificación de acciones)
● Expresión multimodal de estados compartibles
Esto equivale a dotar a los robots de una capa cognitiva capaz de comprender, expresar y aprender.
Así, los robots dejan de ser "ejecutores aislados" y, gracias a una interfaz semántica unificada, pueden integrarse en redes de colaboración de mayor escala.
Además, el mayor avance de los sistemas operativos universales es la "compatibilidad inter-máquina": por primera vez, robots de diferentes marcas y formas pueden "hablar el mismo idioma". Todos los robots pueden conectarse a un mismo bus de datos e interfaz de control a través del mismo sistema operativo.
Source: Openmind
Esta capacidad de interoperabilidad entre marcas permite que la industria discuta por primera vez:
● Colaboración multi-robot
● Puja y programación de tareas
● Percepción y mapas compartidos
● Ejecución conjunta de tareas en distintos espacios
La premisa de la colaboración es "entender el mismo formato de información", y los sistemas operativos universales están resolviendo este problema de lenguaje base.
En el sistema de colaboración multi-dispositivo, peaq representa otra dirección clave de infraestructura: una capa de protocolo que proporciona identidad verificable, incentivos económicos y capacidad de coordinación a nivel de red para las máquinas.(9)
No resuelve cómo los robots "entienden el mundo", sino cómo los robots "participan como individuos en la red de colaboración".
Sus diseños clave incluyen:
1. Identidad de máquina
peaq proporciona registro de identidad descentralizada para robots, dispositivos y sensores, permitiendo que:
● Se conecten como individuos independientes a cualquier red
● Participen en sistemas de asignación de tareas y reputación confiables
Esto es un requisito previo para que las máquinas sean "nodos de red".
2. Cuentas económicas autónomas
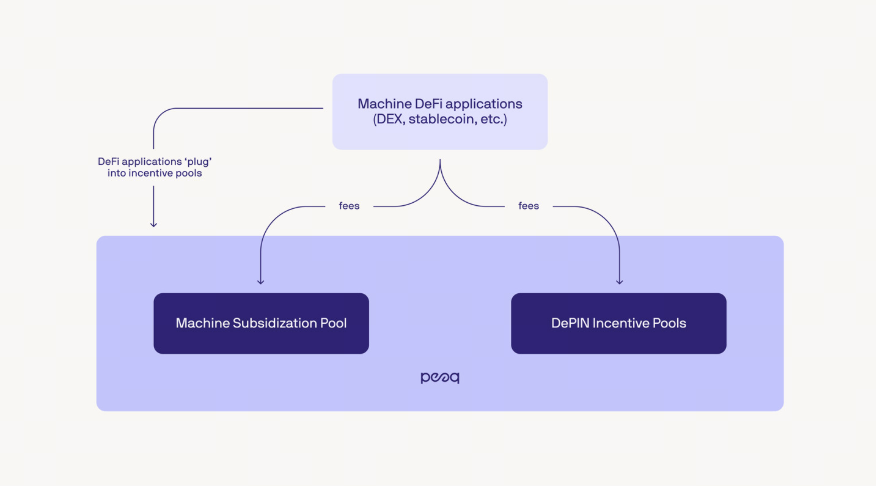
Source: Peaq
Los robots adquieren autonomía económica. Mediante soporte nativo para pagos con stablecoins y lógica de facturación automática, los robots pueden conciliar cuentas y pagar automáticamente sin intervención humana, incluyendo:
● Liquidación por volumen de datos de sensores
● Pago por uso de cómputo y modelos de inferencia
● Liquidación inmediata tras servicios entre robots (transporte, entrega, inspección)
● Uso autónomo de infraestructuras como carga y alquiler de espacio
Además, los robots pueden usar pagos condicionales:
● Tarea completada → pago automático
● Resultado insatisfactorio → fondos congelados o devueltos automáticamente
Esto hace que la colaboración robótica sea confiable, auditable y arbitral automáticamente, una capacidad clave para el despliegue comercial a gran escala.
Además, los ingresos generados por los robots al prestar servicios y recursos en el mundo real pueden tokenizarse y reflejarse on-chain, presentando su valor y flujo de caja de forma transparente, rastreable, negociable y programable, construyendo así una forma de representación de activos centrada en las máquinas.
Con la madurez de la IA y los sistemas on-chain, el objetivo es que las máquinas puedan ganar, pagar, prestar e invertir de forma autónoma, realizar transacciones M2M directamente, formar redes económicas auto-organizadas y lograr colaboración y gobernanza en forma de DAO.
3. Coordinación de tareas multi-dispositivo
En un nivel superior, peaq proporciona un marco de coordinación entre máquinas, permitiendo que:
● Compartan información de estado y disponibilidad
● Participen en subastas y emparejamiento de tareas
● Gestionen recursos (cómputo, movilidad, capacidad sensorial)
Así, los robots pueden colaborar como nodos de red y no operar de forma aislada. Cuando el lenguaje y las interfaces se unifican, los robots pueden realmente entrar en redes colaborativas y no quedarse en ecosistemas cerrados.
OpenMind y otros sistemas operativos inteligentes inter-máquina buscan estandarizar la forma en que los robots "entienden el mundo y las instrucciones"; mientras que Peaq y otras redes de coordinación Web3 exploran cómo permitir que diferentes dispositivos obtengan capacidades organizativas verificables en redes más grandes. Son solo ejemplos de muchos intentos, reflejando que toda la industria avanza hacia una capa de comunicación unificada y un sistema de interoperabilidad abierto.
Red económica de máquinas que permite la participación autónoma en el mercado
Si los sistemas operativos inter-dispositivo resuelven "cómo se comunican los robots" y las redes de coordinación "cómo cooperan", la esencia de la red económica de máquinas es transformar la productividad robótica en un flujo de capital sostenible, permitiendo que los robots paguen por su propio funcionamiento y cierren el ciclo.
Una pieza clave que ha faltado durante mucho tiempo en la industria robótica es la "capacidad económica autónoma". Los robots tradicionales solo ejecutan instrucciones preestablecidas y no pueden gestionar recursos externos, fijar precios a sus servicios ni liquidar costes de forma independiente. En escenarios complejos, dependen de la contabilidad, aprobación y gestión humana en el backend, lo que reduce la eficiencia de la colaboración y dificulta el despliegue a gran escala.
x402: otorga a los robots la "calidad de sujeto económico"
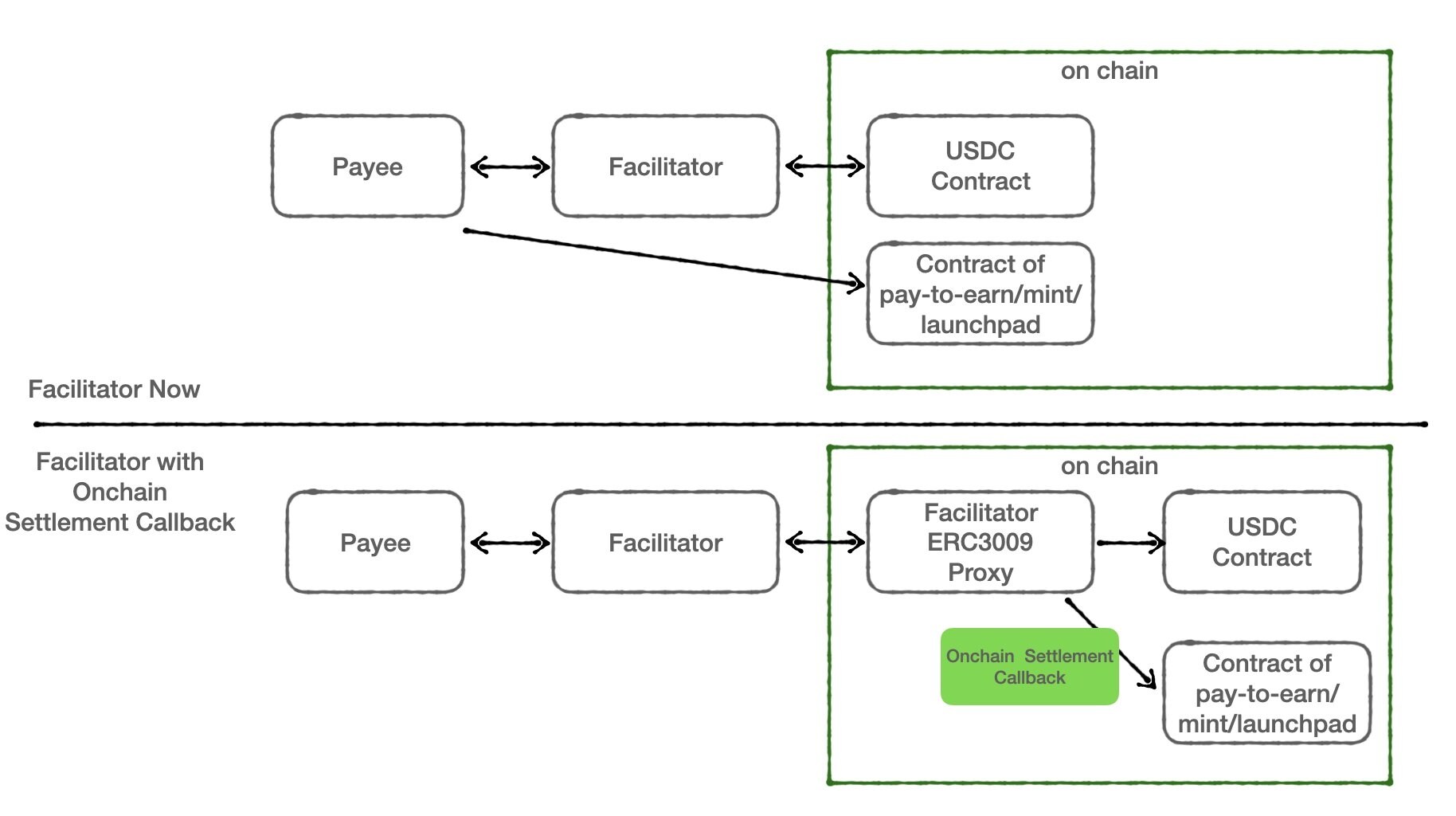
Source: X@CPPP2443_
x402, como nuevo estándar de Agentic Payment, otorga a los robots esta capacidad fundamental. Los robots pueden iniciar solicitudes de pago directamente a través de la capa HTTP y completar liquidaciones atómicas con stablecoins programables como USDC. Esto significa que los robots no solo pueden completar tareas, sino también adquirir de forma autónoma todos los recursos necesarios para ellas:
● Uso de cómputo (inferencia LLM / inferencia de modelos de control)
● Acceso a escenarios y alquiler de equipos
● Servicios laborales de otros robots
Por primera vez, los robots pueden consumir y producir como sujetos económicos autónomos.
En los últimos años, la colaboración entre fabricantes de robots e infraestructuras cripto ha dado lugar a casos representativos, demostrando que la red económica de máquinas está pasando del concepto a la implementación.
OpenMind × Circle: permite que los robots soporten pagos con stablecoins de forma nativa

Source: Openmind
OpenMind integra su sistema operativo robótico inter-dispositivo con USDC de Circle, permitiendo que los robots realicen pagos y liquidaciones con stablecoins directamente en la cadena de ejecución de tareas.
Esto representa dos avances:
1. La cadena de ejecución de tareas robóticas puede integrar liquidación financiera de forma nativa, sin depender del backend
2. Los robots pueden realizar "pagos sin fronteras" en entornos multiplataforma y multimarcas
Para la colaboración robótica, esta es una capacidad básica hacia economías autónomas.
Kite AI: construyendo una blockchain Agent-Native para la economía de máquinas
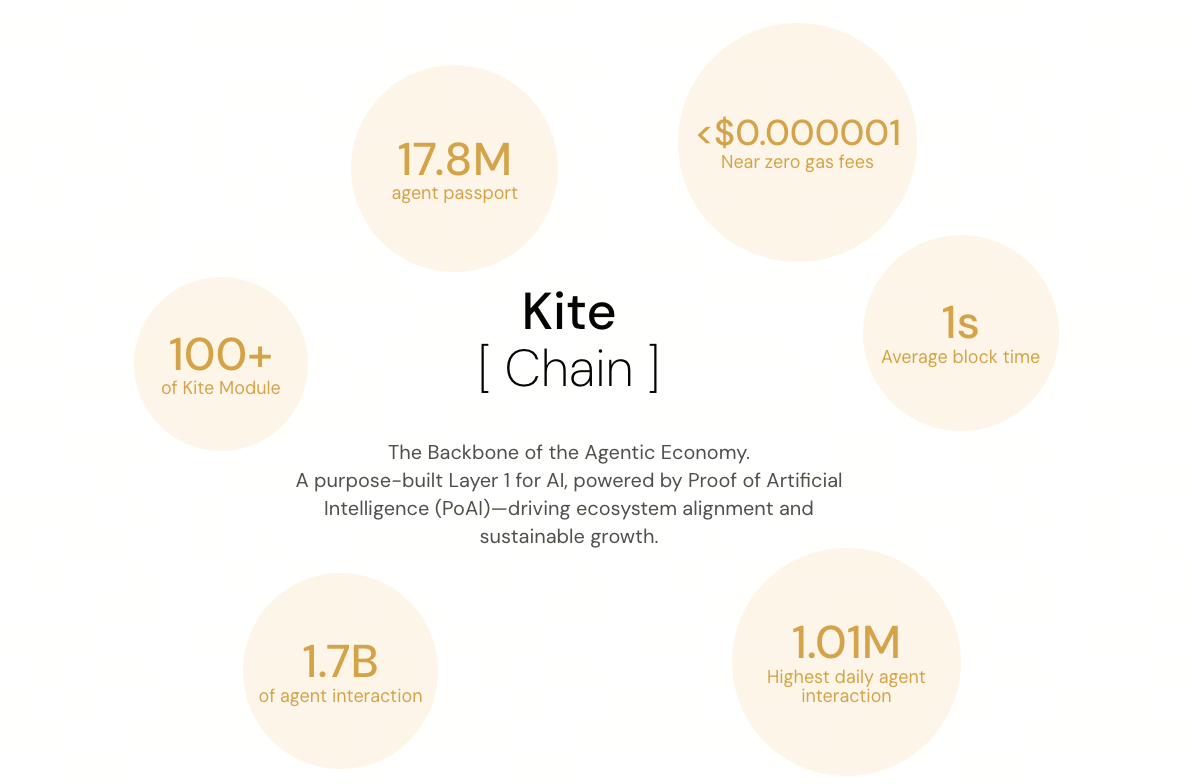
Source: Kite AI
Kite AI lleva aún más lejos la estructura básica de la economía de máquinas: diseña identidad on-chain, monederos composables y sistemas de pago y liquidación automatizados para AI agents, permitiendo que los agentes ejecuten transacciones de forma autónoma on-chain. (10)
Ofrece un entorno completo de "funcionamiento económico autónomo para agentes", altamente alineado con la participación autónoma de robots en el mercado.
1. Capa de identidad Agent/máquina (Kite Passport): otorga a cada AI Agent (y en el futuro a robots concretos) una identidad criptográfica y un sistema de claves multinivel, permitiendo controlar con precisión "quién gasta" y "en nombre de quién actúa", con soporte para revocación y rendición de cuentas, premisa para considerar al Agent como sujeto económico independiente.
2. Stablecoins nativas + primitiva x402 integrada: Kite integra el estándar de pago x402 a nivel de blockchain, usando USDC y otras stablecoins como activos de liquidación por defecto, permitiendo que los Agents completen envíos, recepciones y conciliaciones mediante autorización de intentos estandarizados, optimizando para pagos máquina a máquina de alta frecuencia y bajo importe (confirmación subsegundo, bajo coste, auditable).
3. Restricciones y gobernanza programables: mediante políticas on-chain, se pueden establecer límites de gasto, listas blancas de comerciantes/contratos, reglas de gestión de riesgos y trazabilidad de auditoría para los Agents, equilibrando seguridad y autonomía al "abrir monederos para máquinas".
En otras palabras, si el sistema operativo de OpenMind permite que los robots "entiendan el mundo y colaboren", la infraestructura blockchain de Kite AI permite que los robots "sobrevivan en el sistema económico".
Con estas tecnologías, la red económica de máquinas construye "incentivos de colaboración" y "circuitos de valor", permitiendo no solo que los robots "paguen", sino, lo más importante, que puedan:
● Recibir ingresos por desempeño (liquidación basada en resultados)
● Comprar recursos según necesidad (estructura de costes autónoma)
● Participar en la competencia de mercado con reputación on-chain (cumplimiento verificable)
Esto significa que, por primera vez, los robots pueden participar en un sistema completo de incentivos económicos: pueden trabajar → ganar dinero → gastar dinero → optimizar su comportamiento de forma independiente.
Resumen
Perspectivas
En resumen, el papel de Web3 en la industria robótica se está volviendo cada vez más claro en estas tres direcciones:
● Capa de datos: proporciona impulso para la recopilación de datos a escala y de múltiples fuentes, mejorando la cobertura de escenarios de larga cola;
● Capa de colaboración: introduce identidad unificada, interoperabilidad y mecanismos de gobernanza de tareas para la colaboración entre dispositivos;
● Capa económica: mediante pagos on-chain y liquidaciones verificables, proporciona a los robots un marco programable para el comportamiento económico.
Estas capacidades sientan conjuntamente las bases para una futura Internet de las máquinas, permitiendo que los robots colaboren y operen en un entorno tecnológico más abierto y auditable.
Incertidumbres
Aunque el ecosistema robótico experimenta un avance sin precedentes en 2025, la transición de "tecnológicamente viable" a "escalable y sostenible" aún enfrenta múltiples incertidumbres. Estas no provienen de un único cuello de botella tecnológico, sino de la compleja interacción entre ingeniería, economía, mercado y regulación.
¿Es realmente viable económicamente?
Aunque los robots han logrado avances en percepción, control e inteligencia, su despliegue a gran escala depende en última instancia de la demanda comercial real y del retorno económico. Actualmente, la mayoría de los robots humanoides y robots generales siguen en fase piloto y de validación; aún faltan datos a largo plazo sobre si las empresas están dispuestas a pagar por servicios robóticos y si los modelos OaaS/RaaS pueden mantener un ROI estable en diferentes industrias.
Al mismo tiempo, la ventaja de coste-beneficio de los robots en entornos complejos y no estructurados aún no está totalmente establecida. En muchos casos, las soluciones tradicionales de automatización o mano de obra siguen siendo más baratas y fiables. Esto significa que la viabilidad tecnológica no se traduce automáticamente en viabilidad económica, y la incertidumbre en la comercialización afectará directamente la velocidad de expansión del sector.
Desafíos sistémicos de fiabilidad de ingeniería y complejidad operativa
El mayor reto práctico de la industria robótica no suele ser "si puede completar tareas", sino si puede operar de forma estable, continua y a bajo coste. En el despliegue a gran escala, la tasa de fallos de hardware, los costes de mantenimiento, las actualizaciones de software, la gestión energética y los problemas de seguridad y responsabilidad pueden convertirse rápidamente en riesgos sistémicos.
Aunque el modelo OaaS reduce el gasto de capital inicial, los costes ocultos en operación, seguros, responsabilidad y cumplimiento pueden erosionar el modelo comercial general. Si la fiabilidad no supera el umbral mínimo para escenarios comerciales, la visión de redes robóticas y economía de máquinas será difícil de materializar.
Colaboración ecológica, convergencia de estándares y adaptación regulatoria
El ecosistema robótico está experimentando una rápida evolución de OS, marcos Agent, protocolos blockchain y estándares de pago, pero sigue estando muy fragmentado. Los costes de colaboración entre dispositivos, fabricantes y sistemas son altos, y los estándares generales aún no han convergido, lo que puede provocar fragmentación, duplicación de esfuerzos y pérdida de eficiencia.
Al mismo tiempo, los robots con capacidad de decisión y acción económica autónoma desafían los marcos regulatorios y legales existentes: la asignación de responsabilidades, el cumplimiento de pagos y los límites de datos y seguridad siguen sin estar claros. Si las regulaciones y estándares no avanzan al ritmo de la tecnología, la red económica de máquinas enfrentará incertidumbres en cumplimiento y aplicación.
En general, las condiciones para la aplicación a gran escala de robots se están formando gradualmente, y el prototipo del sistema económico de máquinas ya se vislumbra en la práctica industrial. Aunque Web3 × Robotics sigue en una etapa temprana, ya muestra un potencial de desarrollo a largo plazo digno de atención.
Artículos de referencia
Disclaimer: The content of this article solely reflects the author's opinion and does not represent the platform in any capacity. This article is not intended to serve as a reference for making investment decisions.
You may also like
Standard Chartered y Ant lanzan depósitos tokenizados las 24 horas

El mercado cripto enfrenta una gran oleada de desbloqueo de monedas esta semana
Bitcoin desafía los patrones del mercado bajista con movimientos sorprendentes